| 多翼自治水下机器人动力学建模与姿态控制 |
| |
| 引用本文: | 赵蕊, 许建, 王淼, 向先波, 徐国华. 基于遗传算法和分数阶技术的水下机器人航向控制[J]. 中国舰船研究, 2018, 13(6): 87-93. DOI: 10.19693/j.issn.1673-3185.01185 |
| |
| 作者姓名: | 赵蕊 许建 王淼 向先波 徐国华 |
| |
| 作者单位: | 1.中国舰船研究设计中心, 湖北 武汉 430064;2.华中科技大学 船舶与海洋工程学院, 湖北 武汉 430074 |
| |
| 基金项目: | 教育部高等学校博士学科点专项科研基金资助项目(20120142120045) |
| |
| 摘 要: | 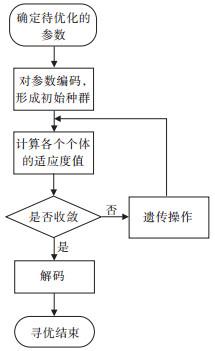
目的 自主式水下机器人(AUV)在海洋资源勘探、水下设备检修、水下搜救等领域发挥着重要作用,是探索海洋、开发海洋资源的重要工具。AUV的航向控制是其完成水下作业任务的基础。目前国内工程上多使用常规整数阶PID(比例、积分、微分)控制器进行航向控制,但该方法存在鲁棒性较差和参数整定复杂的问题。 方法 针对以上常规航向控制方法的不足,提出一种基于分数阶PID技术的航向控制器,并结合遗传算法完成控制参数自动整定,以提高控制器的实用性。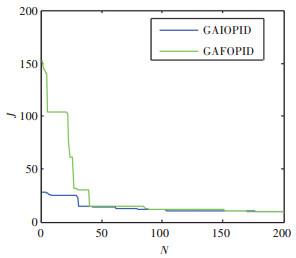
分别对试凑法整定整数阶PID参数、基于遗传算法整定整数阶和分数阶PID参数的3种航向控制器进行算法仿真对比。 结果 结果表明:基于遗传算法整定分数阶PID参数的航向控制器相较于其他2个控制器,在上升时间与稳态误差基本相当的情况下超调量显著减小。 结论 说明基于遗传算法整定参数的分数阶水下机器人航向控制算法有效并具有优越性。

|
| 关 键 词: | 水下机器人 分数阶 遗传算法 航向控制 |
| 收稿时间: | 2018-01-26 |
|
| 点击此处可从《中国舰船研究》浏览原始摘要信息 |
|
点击此处可从《中国舰船研究》下载免费的PDF全文 |
|