| 面向融合运行的飞行员在环建模技术综述 |
| |
| 引用本文: | 魏麟, 杨济睿, 李秀易, 肖越, 郑远, 李诚龙. 面向融合运行的飞行员在环建模技术综述[J]. 交通运输工程学报, 2024, 24(4): 208-227. doi: 10.19818/j.cnki.1671-1637.2024.04.016 |
| |
| 作者姓名: | 魏麟 杨济睿 李秀易 肖越 郑远 李诚龙 |
| |
| 作者单位: | 1.中国民用航空飞行学院 飞行技术学院,四川 广汉 618307;;2.中国民用航空飞行学院 航空电子电气学院,四川 广汉 618307;;3.中国民用航空飞行学院 民航监察员培训学院,四川 广汉 618307;;4.北京航空航天大学 电子信息工程学院,北京 100191;;5.中国民用航空飞行学院 计算机学院,四川 广汉 618307;;6.中国民用航空飞行学院 民航飞行技术与飞行安全重点实验室,四川 广汉 618307 |
| |
| 基金项目: | 国家重点研发计划2022YFB4300902 国家自然科学基金项目U2333214 国家自然科学基金项目U2133209 民航局安全能力建设项目MHAQ2024033 民航飞行技术与飞行安全重点实验室开放基金项目FZ2022KF10 |
| |
| 摘 要: | 
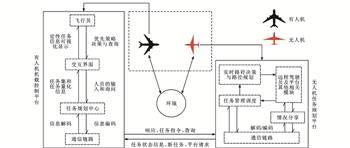
研究了面向有人机与无人机融合运行环境的飞行员模型,基于有人机舱内驾驶和无人机远程遥控驾驶2种操纵类型,介绍了飞行员建模技术的发展历程和各模型特点,通过仿真软件研究了有人机与无人机飞行员在环的响应特性,讨论了通信延迟环节对于无人机驾驶回路的影响,总结了各类飞行员模型在不同任务场景下的适用性和不足之处。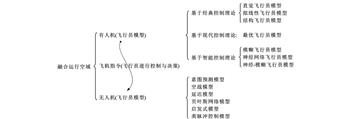
研究结果表明:面向融合运行环境的飞行员建模瓶颈主要体现在有人机与无人机飞行员所处的操纵回路异构、无人机飞行员缺乏临场情景意识和无人机系统指挥与控制链路(C2链路)存在不确定性延迟等方面;有人机飞行员建模总体上是根据控制理论方法描述人体结构和飞行员的操纵特性,且人工智能方法的发展使得基于智能控制理论的飞行员模型设计方法能够更好地描述飞行员的操纵特性;无人机飞行员由于处于不同的操纵回路位置,远程遥控驾驶通过C2链路实现无人机状态感知和操纵指令上行,因此,无人机飞行员模型建模更趋向于人在环路的表达,需根据应用场景设计相匹配的飞行员模型,才可更真实地反映飞行员在特定场景下的控制与决策行为特性;面向未来的融合运行环境,构建人在环路模型应重点考虑如何描述无人机远程飞行员因临场情景意识缺乏导致的决策差异,如何更好地拟合人机系统操纵特性,以及如何构建具有高效、可靠、低延迟C2链路的飞行员模型等问题。
|
| 关 键 词: | 航空控制 融合运行 有人机 无人机 飞行员模型 飞行员在环 指挥与控制链路 |
| 收稿时间: | 2023-12-02 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|