|
|||||
|
|
| 水面无人艇集群系统研究 | |
| 引用本文: | 焦宇航, 王宁. 欠驱动无人船集群有限时间跟踪控制[J]. 中国舰船研究, 2023, 18(6): 76–87. doi: 10.19693/j.issn.1673-3185.02958 |
| 作者姓名: | 焦宇航 王宁 |
| 作者单位: | 1.大连海事大学 船舶电气工程学院,辽宁 大连 116026;2.大连海事大学 轮机工程学院,辽宁 大连 116026 |
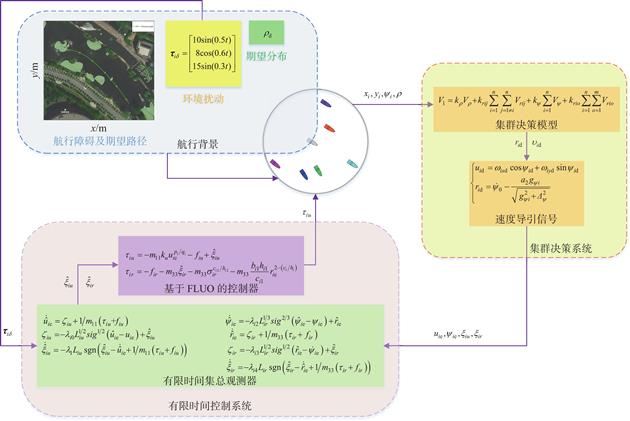
| 摘 要: |  针对具有未建模动态、外部环境干扰及未知集群参考信号的欠驱动无人船(USV)集群跟踪问题,研究USV集群运动决策机制并提出有限时间集群跟踪控制方法。 首先,利用Lyapunov函数和人工势函数,结合集群虚拟参考船位置信息,构造速度导引的集群运动决策策略;然后,设计有限时间集总不确定观测器(FLUO),对速度误差方程中包含的未知信息予以补偿;最后,设计基于FLUO的非奇异终端滑模(NTSM)集群跟踪控制方法(FLUO−NTSM)。 通过理论分析和仿真试验,证明系统在有限时间内稳定。 基于所提集群运动决策策略和FLUO−NTSM跟踪控制方法,USV可保持群集并实现精准路径跟踪。  |
| 关 键 词: | 无人船集群决策 无人船集群控制 非奇异终端滑模控制 有限时间不确定观测器 |
| 收稿时间: | 2022-06-13 |
| 修稿时间: | 2023-05-09 |
| 点击此处可从《中国舰船研究》浏览原始摘要信息 | |
| 点击此处可从《中国舰船研究》下载免费的PDF全文 | |