| 大规模路网中分布式车辆群体协同决策方法 |
| |
| 引用本文: | 裴华鑫, 杨敬轩, 胡坚明, 张毅. 大规模路网中分布式车辆群体协同决策方法[J]. 交通运输工程学报, 2022, 22(3): 174-183. doi: 10.19818/j.cnki.1671-1637.2022.03.014 |
| |
| 作者姓名: | 裴华鑫 杨敬轩 胡坚明 张毅 |
| |
| 作者单位: | 1.清华大学 信息科学技术学院,北京 100084;;2.清华大学 北京信息科学与技术国家研究中心,北京 100084;;3.清华-伯克利深圳学院,广东 深圳 518055;;4.东南大学 现代城市交通技术江苏高校协同创新中心,江苏 南京 210096 |
| |
| 基金项目: | 国家重点研发计划2018YFB1600600 |
| |
| 摘 要: | 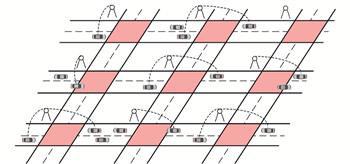
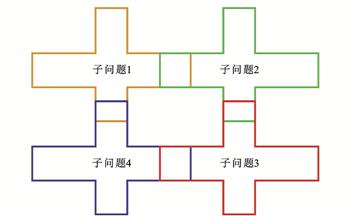
为解决车路协同环境下大规模路网中车辆群体协同决策问题,提出了分布式车辆群体协同决策方法;在深入分析交通控制特性的基础上,构建了路网分解模型,将大规模协同决策问题分解成若干个同质小规模子问题,每个子问题覆盖了上游路段、路口和下游路段这3类不同交通区域;基于虚拟车辆映射技术构建了车辆群体协同决策模型,将路口区域二维车辆群体协同决策问题转化为一维问题;与路段区域内车辆群体协同决策方式相同,在路口区域内通过控制虚拟车队中车辆的等效车头时距来完成车辆之间的交互和冲突消解,进而采用统一的协同决策参数来解决各子问题中不同区域内车辆群体的协同决策问题;基于不同区域内车辆群体协同决策参数的统一化,设计了上、下游区域之间的协作机制来保证上游车辆在充分考虑下游交通状态的基础上做出合适的驾驶决策。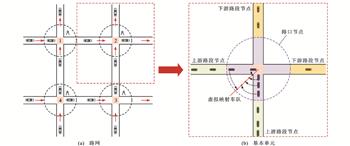
仿真结果表明:在不同的交通需求设置下,采用提出的方法后,车辆在通过冲突区的过程中均具有平滑的时空轨迹,避免了车辆时空轨迹出现剧烈波动;相对于纯分布式方法,提出的方法在给定的仿真条件下可使车辆燃油消耗最大降低14%;因此,在大规模路网中实施提出的分布式车辆群体协同决策方法可有效降低冲突区对车流连续性的影响,从而保证了车辆安全、平稳、环保地行驶。
|
| 关 键 词: | 智能交通 智能车路协同系统 协同决策 大规模路网 分布式策略 |
| 收稿时间: | 2022-01-22 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|