| 车路协同环境下群体车辆诱导与协同运行方法 |
| |
| 引用本文: | 上官伟, 庞晓宇, 李秋艳, 柴琳果. 车路协同环境下群体车辆诱导与协同运行方法[J]. 交通运输工程学报, 2022, 22(3): 68-78. doi: 10.19818/j.cnki.1671-1637.2022.03.005 |
| |
| 作者姓名: | 上官伟 庞晓宇 李秋艳 柴琳果 |
| |
| 作者单位: | 1.北京交通大学 电子信息工程学院,北京 100044;;2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044 |
| |
| 基金项目: | 国家重点研发计划2018YFB1600600民航机场群智慧运营重点实验室开放基金课题KLAGI020180901国家自然科学基金项目61773049 |
| |
| 摘 要: | 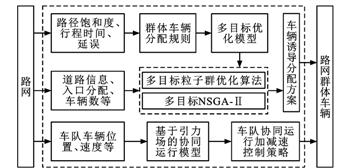
为解决城市发展带来的交通拥堵问题,发掘道路交通的潜力,提高车路协同环境下车辆在路网中的行驶效率,面向群体车辆提出了一种诱导优化方法和协同控制策略;在车辆诱导分配方面,在起始点和目的地之间的可达路径中,以交通效率最优、车辆排放最小为目标,设计了基于道路饱和度、车辆行程时间和延误的群体车辆分配规则,建立了群体车辆诱导分配优化模型,并用多目标非支配排序遗传算法-Ⅱ(NSGA-Ⅱ)和多目标粒子群优化算法进行求解;在车辆协同运行控制策略方面,基于引力场思想建立了多车协同运行模型,并提出了多车协同加减速策略;通过仿真验证比较了不同网联自动驾驶车辆(CAV)渗透率下的车辆诱导优化结果,同时仿真了车辆协同加减速策略,并将诱导优化方法和协同控制策略进行了联合仿真。仿真结果表明:多目标诱导分配方法可以提升车辆速度和环境效益,且群体车辆平均速度与CAV渗透率正相关;在四车组队行驶环境中,车辆协同加减速策略能够将车辆在加速和减速时的初始平均加速度分别提高15.0%和8.2%,让车辆快速达到目标速度,保障行车安全;在联合仿真环境中,路网群体车辆的加速度平均提高了11.6%,速度平均提高了1.6%,碳氧化合物排放量减少约4.9%。
由此可见,提出的方法能够提高路网通行效率,降低车辆能源消耗,减少对环境造成的不良影响。

|
| 关 键 词: | 智能交通 车路协同 群体智能 交通流诱导 多目标优化 协同控制策略 |
| 收稿时间: | 2021-12-16 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|