| 基于轴距预瞄的汽车半主动悬架控制及试验 |
| |
| 引用本文: | 贝绍轶, 袁传义, 冯俊萍. 基于轴距预瞄的汽车半主动悬架控制及试验[J]. 交通运输工程学报, 2009, 9(5): 44-48. doi: 10.19818/j.cnki.1671-1637.2009.05.008 |
| |
| 作者姓名: | 贝绍轶 袁传义 冯俊萍 |
| |
| 作者单位: | 江苏技术师范学院 汽车工程学院, 江苏 常州 213001 |
| |
| 基金项目: | 江苏省高校自然科学研究项目06KJD460054 |
| |
| 摘 要: | 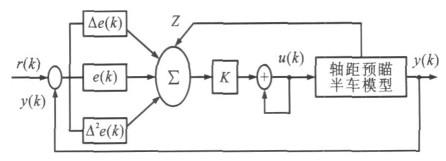
为了研究轴距预瞄控制技术对半主动悬架系统性能的影响, 构建了基于轴距预瞄的1/2车辆半主动悬架综合模型, 结合神经网络和PID控制理论, 提出了单神经元自适应PID控制算法, 设计了轴距预瞄半主动悬架单神经元PID控制系统, 进行了仿真计算。为研究单神经元自适应PID控制策略的有效性及其控制系统的可靠性, 同时进行了基于轴距预瞄的实车道路试验。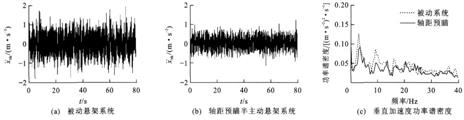
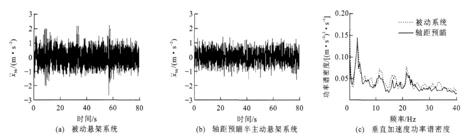
研究结果表明: 与被动悬架系统相比, 在车速为50km.h-1时, 车身质心垂直加速度的峰值和标准差分别减少了20.91%和19.11%;车速为60km.h-1时, 分别减少了24.42%和26.85%, 并且俯仰角加速度也有一定程度降低, 较好改善了车辆的行驶平顺性。
|
| 关 键 词: | 汽车工程 半主动悬架 轴距预瞄 神经元PID 路面不平度 |
| 收稿时间: | 2009-05-11 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|