| 高速列车滑模自抗扰黏着控制方法 |
| |
| 引用本文: | 李中奇, 黄琳静, 周靓, 杨辉, 唐博伟. 高速列车滑模自抗扰黏着控制方法[J]. 交通运输工程学报, 2023, 23(2): 251-263. doi: 10.19818/j.cnki.1671-1637.2023.02.018 |
| |
| 作者姓名: | 李中奇 黄琳静 周靓 杨辉 唐博伟 |
| |
| 作者单位: | 1.华东交通大学 电气与自动化工程学院, 江西 南昌 330013;2.华东交通大学 轨道交通基础设施性能监测与保障国家重点实验室, 江西 南昌 330013 |
| |
| 基金项目: | 国家重点研发计划(2020YFB1713703);;国家自然科学基金项目(52162048,61991404,U2034211);;江西省主要学科学术和技术带头人培养计划(20213BCJ22002)~~; |
| |
| 摘 要: | 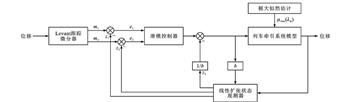
为解决高速列车运行过程中因轨面情况改变,导致列车没有达到最大黏着利用而出现空转或滑行等问题,设计了一种基于最大黏着系数的滑模自抗扰(SM-ADRC)黏着控制器;考虑轮轨间黏着特性的复杂、时变与非线性等特点,基于黏着机理分析,建立了轮轨间牵引系统的力学模型;采用极大似然估计(MLE)方法对不同轨面的相关参数进行辨识,计算了当前轨面的最大黏着系数,保证列车始终能达到最大黏着利用;通过引入滑模算法改进了自抗扰控制(ADRC)中非线性误差反馈控制律部分,设计了一种SM-ADRC黏着控制算法,利用Levant跟踪微分器减小初始跟踪误差,利用扩张状态观测器(ESO)估计和补偿系统总的外部扰动,由滑模控制提高系统的鲁棒性;采用MATLAB软件对CRH380A型高速列车进行仿真,在轨面情况改变时,由SM-ADRC黏着控制器控制列车跟踪设定速度,并将其与比例积分微分(PID)控制器、滑模控制器、ADRC的仿真结果进行对比。仿真结果表明:干燥轨面的最大黏着系数是0.160,16 s时辨识出真值;潮湿轨面的最大黏着系数是0.106,18 s时辨识出真值;ADRC的速度跟踪误差范围为±1 km·h-1,轨面变化后,速度跟踪误差波动幅度较大;SM-ADRC黏着控制器的速度跟踪误差范围为±0.4 km·h-1,轨面变化后,速度跟踪误差波动幅度较小,更加平滑稳定,速度控制跟踪精度更高,且优于PID和滑模控制方法。可见,所提出的SM-ADRC黏着控制器能够实现列车的快速黏着控制,并达到最大的黏着利用。
|
| 关 键 词: | 高速列车 黏着控制 自抗扰控制 滑模控制 轮轨模型 极大似然估计 |
| 收稿时间: | 2022-10-21 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|