| 尾滑道式船载小艇收放系统的研发及应用 |
| |
| 引用本文: | 冯大奎, 占进, 严军, 孙月, 王先洲. 规则波中无人艇回收的水动力性能分析[J]. 中国舰船研究, 2020, 15(3): 38-44. DOI: 10.19693/j.issn.1673-3185.01595 |
| |
| 作者姓名: | 冯大奎 占进 严军 孙月 王先洲 |
| |
| 作者单位: | 1.华中科技大学 船舶与海洋工程学院, 湖北 武汉 430074;2.高新船舶与深海开发装备协同创新中心, 上海 200240;3.船舶与海洋工程水动力湖北省重点实验室, 湖北 武汉 430074;4.中国舰船研究设计中心, 湖北 武汉 430064 |
| |
| 基金项目: | 装备预研共用技术资助项目(41407010401) |
| |
| 摘 要: | 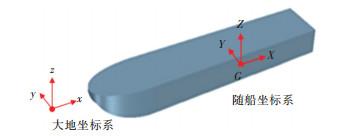
目的 小艇回收过程是典型的多体相互干扰的动力学问题,纵向滑道回收是常用的回收方式,小艇在大船尾流中快速运动冲向艉部捕捉装置时,受到大船的尾流影响,可能会出现倾覆的危险。 方法 采用粘性流数值波浪水池、重叠网格和六自由度运动等技术,以DTMB 5415为母船,模拟Fridsma型无人滑行艇(以下简称无人艇)快速接近母船过程中的干扰运动。计算分析无人艇在波浪中的运动特性,在此基础上开展波浪中小艇在大船尾流中的运动仿真。
结果 计算结果与试验结果的比较表明计算方法可靠。仿真计算结果表明小艇受大船尾流的影响较为明显。 结论 当小艇运动方向不在大船尾流正中心时,小艇的纵倾和横摇会受到显著影响,最终导致倾覆现象的发生。

|
| 关 键 词: | 艉滑道式小艇收放技术 无人水面艇 CFD 重叠网格技术 数值波浪水池 船舶运动 |
| 收稿时间: | 2019-04-30 |
| 修稿时间: | 2019-06-30 |
|
| 点击此处可从《中国舰船研究》浏览原始摘要信息 |
|
点击此处可从《中国舰船研究》下载免费的PDF全文 |
|