| 不完全驱动船舶非线性控制 |
| |
| 引用本文: | 李铁山, 杨盐生, 郑云峰. 不完全驱动船舶非线性控制[J]. 交通运输工程学报, 2003, 3(4): 39-43. |
| |
| 作者姓名: | 李铁山 杨盐生 郑云峰 |
| |
| 作者单位: | 大连海事大学,航海学院,辽宁,大连,116026;大连海事大学,航海学院,辽宁,大连,116026;大连海事大学,航海学院,辽宁,大连,116026 |
| |
| 基金项目: | 教育部博士点基金项目(20020151005) |
| |
| 摘 要: | 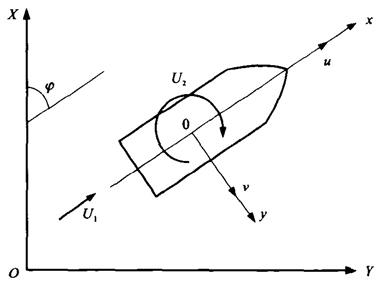
介绍了不完全驱动系统及其意义, 建立了船舶港内自动靠离泊模型和海上航运控制模型。以船舶在大洋航行或长距离转向点间航行中经常发生的直线轨迹跟踪为例, 运用输入-输出线性化设计方法, 给出了一个具有渐近跟踪能力的控制律。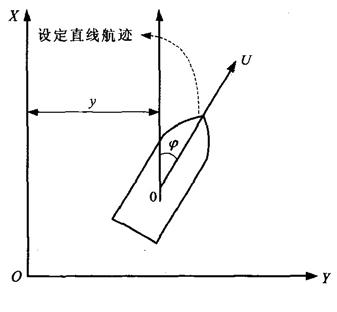
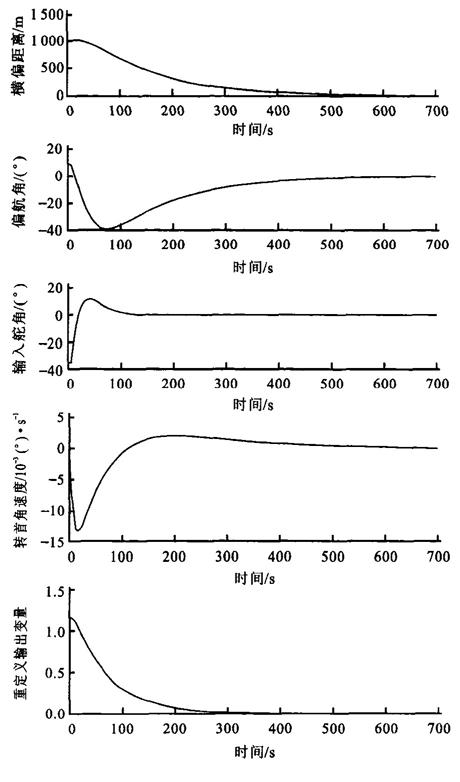
将该控制律应用于一个实例, 并用Matlab语言进行了计算机仿真, 结果表明该控制器可以解决船舶的不完全控制问题。
|
| 关 键 词: | 船舶工程 不完全驱动系统 非线性控制 输入-输出线性化 非完整系统 |
| 文章编号: | 1671-1637(2003)04-0039-05 |
| 收稿时间: | 2003-06-16 |
| 修稿时间: | 2003-06-16 |
| 本文献已被 CNKI 维普 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|