| 磁流变半主动座椅悬架建模及振动特性分析 |
| |
| 引用本文: | 史文库, 张曙光, 陈志勇, 张友坤. 磁流变半主动座椅悬架建模及振动特性分析[J]. 西南交通大学学报, 2023, 58(2): 253-260. doi: 10.3969/j.issn.0258-2724.20210882 |
| |
| 作者姓名: | 史文库 张曙光 陈志勇 张友坤 |
| |
| 作者单位: | 吉林大学汽车仿真与控制国家重点实验室,吉林 长春 130000 |
| |
| 基金项目: | 国家重点研发计划(2018YFB0106200) |
| |
| 摘 要: | 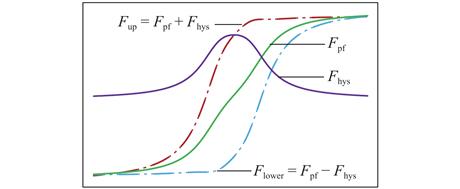
磁流变阻尼器力学模型及控制电流逆模型对半主动控制系统的控制精度具有重要影响. 采用正弦及余弦型魔术公式,基于骨架曲线与滞回分离的建模方法,建立改进的磁流变阻尼器动态阻尼力模型;采用基于Sobol序列的差分-禁忌混合优化算法对阻尼力模型进行参数识别,构建包含激励特性及控制电流参数的通用数学模型;在试验测试及正向模型基础上,利用自适应神经模糊系统建立阻尼器控制电流逆模型. 研究结果表明:本文建立的正逆模型均能够有效表征磁流变阻尼器的非线性行为及滞回特性;改进魔术公式模型在不同激励特性及电流工况下的平均百分比误差在3.4%附近变化;逆向动力学模型计算的控制电流误差均方根值为0.
0869~0.1171 A;经过控制电流逆模型与阻尼器正向模型串联模型计算的预测阻尼力误差均方根值为阻尼器最大阻尼力的5.6%;通过试验测试与仿真结果对比,验证了本文提出的阻尼器数学模型具有较好的精度和适用性,能够改善座椅悬架系统振动传递特性.
|
| 关 键 词: | 车辆工程 座椅悬架 磁流变阻尼器 振动控制 数学模型 |
| 收稿时间: | 2021-11-16 |
| 修稿时间: | 2022-02-17 |
|
| 点击此处可从《西南交通大学学报》浏览原始摘要信息 |
|
点击此处可从《西南交通大学学报》下载全文 |
|