| 车辆主动悬挂最优预见控制模型 |
| |
| 引用本文: | 朱浩, 刘少军, 邱显焱. 车辆主动悬挂最优预见控制模型[J]. 交通运输工程学报, 2005, 5(3): 8-13. |
| |
| 作者姓名: | 朱浩 刘少军 邱显焱 |
| |
| 作者单位: | 1.中南大学 机电工程学院, 湖南 长沙 410083;;2.株洲工学院 机械系, 湖南 株洲 412000 |
| |
| 基金项目: | 教育部科技研究重点项目(01131) |
| |
| 摘 要: | 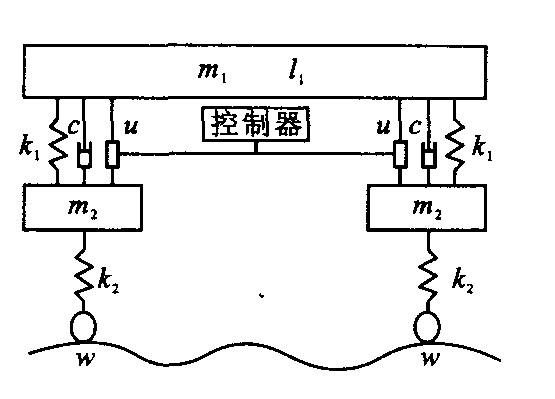
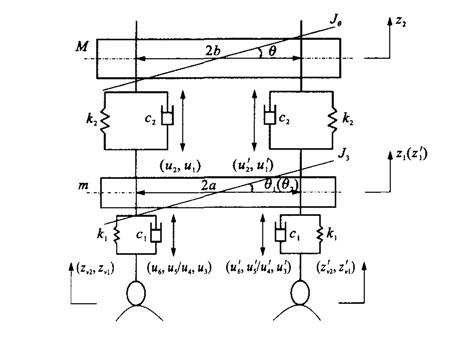
以复杂多自由度的车辆系统设计模型代替传统的简化模型, 建立了主动悬挂控制车辆系统模型, 设计了最优预见控制器, 研究了车体的浮沉、点头、侧滚3种运动状态在加控制和未加控制时的路面激扰响应。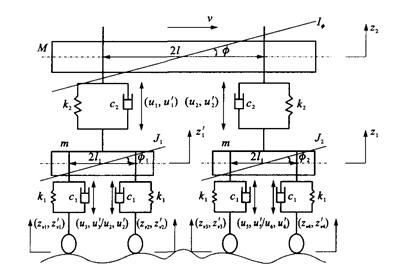
仿真计算结果表明在最优控制下车体的浮沉响应降低了27%, 点头响应降低了30%, 侧滚响应降低了30%;在预见控制二次加权矩阵的作用下, 车体的浮沉响应降低了54%, 点头响应降低了50%, 侧滚响应降低了45%;根据预见控制的提前预见可适时响应的特点, 系统可按设定目标预见步数提前作出响应, 由此验证了最优预见控制在复杂多自由度的车辆主动悬挂设计模型中应用的可行性和有效性。
|
| 关 键 词: | 车辆工程 多自由度 主动悬挂 最优预见控制 |
| 文章编号: | 1671-1637(2005)03-0008-06 |
| 收稿时间: | 2005-05-15 |
| 修稿时间: | 2005-05-15 |
| 本文献已被 CNKI 维普 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|