| 车辆主动转向的变结构控制器设计 |
| |
| 引用本文: | 杜峰, 魏朗, 赵建有. 车辆主动转向的变结构控制器设计[J]. 交通运输工程学报, 2009, 9(1): 35-39. doi: 10.19818/j.cnki.1671-1637.2009.01.008 |
| |
| 作者姓名: | 杜峰 魏朗 赵建有 |
| |
| 作者单位: | 长安大学 汽车学院, 陕西 西安 71006 |
| |
| 基金项目: | 陕西省自然科学基础研究计划 |
| |
| 摘 要: | 
针对基于线控转向技术的四轮主动转向汽车, 利用滑模变结构控制策略, 以提高车辆在紧急避障和危险工况下运行的安全性。将实际车辆的前、后轮侧偏刚度及外部干扰视为有界的不确定性参数, 利用确定性线性车辆模型作为理想跟踪目标, 进行车辆主动转向的变结构控制器设计。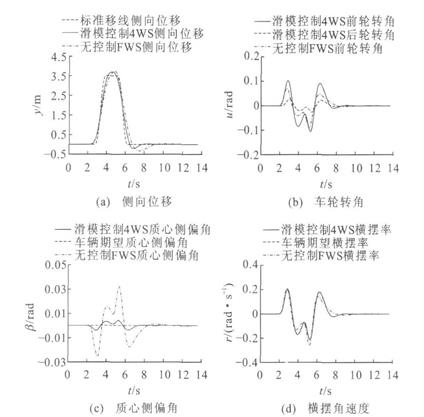
人-车-路闭环系统仿真结果表明: 当轮胎侧偏刚度摄动或有外部侧风干扰时, 变结构控制的四轮主动转向汽车实现了转向零质心侧偏角和跟踪期望横摆率的控制目标, 其双移线仿真最终路径偏差分别为0m和0.05m, 被控车辆系统表现出了良好的路径跟踪性和在不确定影响下的鲁棒性, 车辆的操纵稳定性与主动安全性得到了提高。

|
| 关 键 词: | 汽车工程 四轮转向 模型跟踪 变结构控制器 |
| 收稿时间: | 2008-10-12 |
| 本文献已被 CNKI 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|