| 特种CAV优先的集中式匝道合流协同控制方法 |
| |
| 引用本文: | 王秋玲, 赵祥模, 徐志刚, 朱璋元, 官文英. 特种CAV优先的集中式匝道合流协同控制方法[J]. 交通运输工程学报, 2022, 22(1): 263-272. doi: 10.19818/j.cnki.1671-1637.2022.01.022 |
| |
| 作者姓名: | 王秋玲 赵祥模 徐志刚 朱璋元 官文英 |
| |
| 作者单位: | 1.长安大学 运输工程学院,陕西 西安 710064;;2.长安大学 信息工程学院,陕西 西安 710064 |
| |
| 摘 要: | 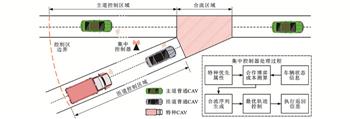
为保障无人驾驶环境下特种车辆在典型Y型匝道合流区快速平稳通过,研究了全网联自动驾驶车辆(CAV)集中控制场景中考虑特种车辆优先通行的协同控制方法;通过博弈确定了控制区内合流序列排布,考虑特种CAV任务优先属性与车型特征,分别设计了与加速度关联的特种CAV车道优先属性、与时间关联的车种优先属性和与加速度变化率关联的车型稳定优先属性,并在成本函数中进行联合表征;将特种CAV参与的合流序列排布转化为最优序列集求解,应用二人合作博弈收益矩阵法确定了最优合流序列;依据排序结果,应用庞特里亚金最大值原理求解了车辆轨迹控制,在最小策略成本下求得纵向轨迹最优解析解,实现了考虑特种CAV优先通行的协同控制;应用Python开发语言在实施算例中仿真验证了考虑特种CAV优先通行的协同控制方法,并与无控制策略和先进先出策略进行油耗与通行时间对比。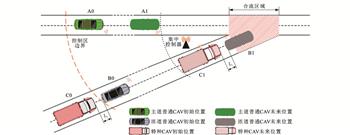
研究结果表明:应用协同控制方法在有效保障特种CAV优先通行的基础上,有86%的车辆在合流期间可以保证以最大速度平稳通过合流区域;相比于无控制策略和先进先出策略,在累计油耗方面分别降低了11.8%与16.1%,车队通过合流区域的总时长领先2类传统合流策略各3 s;最大限速、初始速度和控制区长度均对应存在使特种CAV快速通行的阈值,可为合流区域设计提供参考。

|
| 关 键 词: | 交通控制 匝道合流协同控制 合作博弈 特种车辆 网联自动驾驶车辆 车辆轨迹控制 |
| 收稿时间: | 2021-10-12 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|