| 新型混合交通流场景下交叉口信号控制和轨迹控制协同优化方法 |
| |
| 引用本文: | 王方凯, 杨晓光, 江泽浩, 刘聪健. 新型混合交通流场景下交叉口信号控制和轨迹控制协同优化方法[J]. 交通信息与安全, 2024, 42(1): 76-83. doi: 10.3963/j.jssn.1674-4861.2024.01.009 |
| |
| 作者姓名: | 王方凯 杨晓光 江泽浩 刘聪健 |
| |
| 作者单位: | 1.同济大学道路与交通工程教育部重点实验室 上海 200092;2.华中科技大学土木与水利工程学院 武汉 430074 |
| |
| 基金项目: | 国家自然科学基金项目52102377国家自然科学基金项目52072264道路与交通工程教育部重点实验室(同济大学)开放基金项目K202201 |
| |
| 摘 要: | 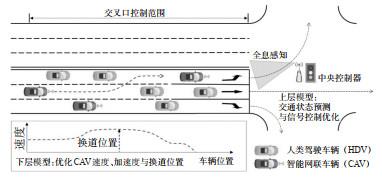
针对人类驾驶车辆(human driven vehicle,HDV)和智能网联车辆(connected and autonomous vehicle,CAV)组成的新型混合交通流场景,现有的交叉口协同控制方法中,集中控制和单车控制分别对中央控制器的算力和车载计算单元的算力要求较高。本文研究了1种将元胞传输模型(cell transmission model,CTM)与双层规划模型相结合的协同优化方法,利用可调整的元胞长度平衡求解信号控制与CAV轨迹优化2个问题所需的算力,从而灵活地根据中央控制器和车载计算单元的算力分配计算资源;通过上层模型预测交通流状态并优化信号控制参数,引入动态调整元胞长度规则,降低中央控制器的计算负担;基于上层的交通状态预测结果,利用下层模型对CAV轨迹进行全局规划,进一步提升交叉口通行效率。同时,为了提升解的最优性和求解的实时性,采用结合随机梯度下降法和遗传算法的迭代优化算法,避免陷入局部最优的同时提升求解效率。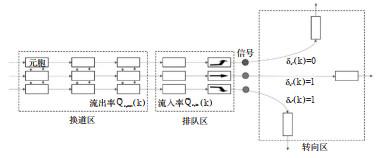
最后以无锡市先锋中路与春风南路交叉口数据为例,验证了不同CAV渗透率下优化的效果,结果表明:①相较于基准方案,本文提出的协同优化方案最高可以降低交叉口8.09%的车均行程时间,降低了交叉口拥堵向上游的传播;②当CAV渗透率为30%、60%和90%时,优化比例为2.51%、5.08%和7.88%;③在进口道流量大于3 000 pcu/h时,仍能在100s内获得最优信号控制方案,可支持实时优化。该方法可以有效改善城市交通拥堵,提高新型混合交通流场景下交叉口的通行效率。

|
| 关 键 词: | 交通控制 新型混合交通流 信号控制与轨迹优化 双层规划模型 |
| 收稿时间: | 2023-06-28 |
|
| 点击此处可从《交通信息与安全》浏览原始摘要信息 |
|
点击此处可从《交通信息与安全》下载免费的PDF全文 |
|