| 基于数据驱动的无人船轨迹跟踪自适应控制 |
| |
| 引用本文: | 王维坤, 刘加朋, 王保防, 等. 基于数据驱动的无人船轨迹跟踪自适应控制[J]. 中国舰船研究, 2025, 20(1): 223–231. DOI: 10.19693/j.issn.1673-3185.03503 |
| |
| 作者姓名: | 王维坤 刘加朋 王保防 赵科淇 于金鹏 |
| |
| 作者单位: | 青岛大学 自动化学院,山东 青岛 266071 |
| |
| 基金项目: | 国家重点研发计划资助项目(2017YFB1303503);国家自然科学基金资助项目(61973179);长江学者特聘专项计划资助(T2022265) |
| |
| 摘 要: | 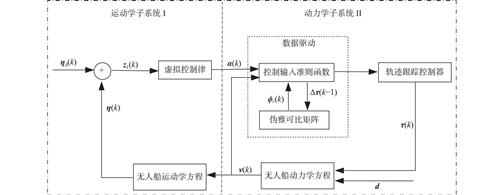
目的针对具有参数不确定性的无人船系统,提出一种基于数据驱动的无人船轨迹跟踪控制策略。方法首先,运用反步法设计无人船运动学子系统的虚拟控制信号,确保系统轨迹跟踪的准确性;其次,通过数据驱动的方法设计无人船动力学子系统的控制器,减轻未知扰动等不确定性因素带来的影响,降低控制器设计的复杂程度。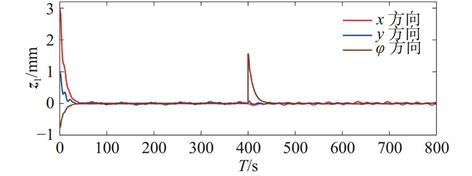
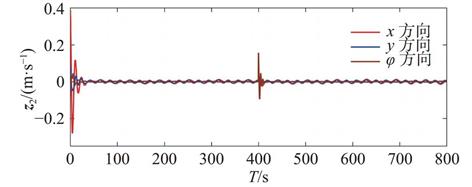
结果采用递归原理,通过分析系统伪雅可比矩阵、动力学和运动学跟踪误差收敛,证明了系统的稳定性。结论仿真结果表明,所提控制策略可以对无人船期望轨迹进行有效跟踪,验证了控制方案的有效性。
|
| 关 键 词: | 无人船 轨迹跟踪 反步控制 数据驱动 运动控制 |
| 收稿时间: | 2023-08-10 |
| 修稿时间: | 2023-12-31 |
|
| 点击此处可从《中国舰船研究》浏览原始摘要信息 |
|
点击此处可从《中国舰船研究》下载免费的PDF全文 |
|