| 欠驱动船舶自适应迭代滑模轨迹跟踪控制 |
| |
| 引用本文: | 沈智鹏, 代昌盛, 张宁. 欠驱动船舶自适应迭代滑模轨迹跟踪控制[J]. 交通运输工程学报, 2017, 17(6): 125-134. |
| |
| 作者姓名: | 沈智鹏 代昌盛 张宁 |
| |
| 作者单位: | 大连海事大学 船舶电气工程学院, 辽宁 大连 116026 |
| |
| 基金项目: | 国家自然科学基金项目51579024 中国博士后科学基金项目2016M601293 辽宁省自然科学基金项目201602072 中央高校基本科研业务费专项资金项目3132016311 |
| |
| 摘 要: | 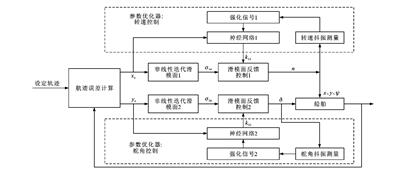
针对欠驱动船舶轨迹跟踪控制问题, 考虑系统存在未知参数和外界扰动, 提出了一种带强化学习的神经网络自适应迭代滑模控制方法; 利用轨迹跟踪的横向和纵向误差信息构造非线性迭代滑模面, 分别设计了船舶柴油机转速和舵角的神经网络迭代滑模控制器; 根据船舶柴油机转速和舵角的实时测量值, 计算了反映控制量抖振状态的强化学习信号, 在线优化了神经网络的结构和参数, 以抑制控制量的抖振, 进一步增强控制系统的自适应性; 建立了5446TEU集装箱船舶数学模型, 分别对圆轨迹和正弦轨迹进行了跟踪控制。仿真结果表明: 在风浪扰动下圆轨迹跟踪时, 与迭代滑模控制策略相比, 采用提出的控制策略250s左右能跟踪上目标轨迹, 速度提高约1倍, 最大跟踪偏航距离为250m, 误差减小约30%, 控制舵角在400s后基本平稳, 波动幅值约为2°, 舵角和柴油机转速的抖振变化幅值均减小了50%以上, 柴油机转速控制参数和舵角控制参数分别在38~45和3.3~3.9之间实现了自适应调节; 在正弦轨迹跟踪时, 与模糊迭代滑模控制策略相比, 采用提出的控制策略纵向跟踪平均误差小于20m, 减小了50%以上, 舵角抖振量平均幅值小于10°, 减小了60%以上, 柴油机转速控制参数和舵角控制参数分别在5.7~5.8和0.8~2.5之间实现了自适应调节。
|
| 关 键 词: | 欠驱动船舶 轨迹跟踪 柴油机转速 船舶舵角 自适应迭代滑模 神经网络 强化学习 |
| 收稿时间: | 2017-07-21 |
| 本文献已被 CNKI 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|