| 混合动力客车模式切换多控制器的协调控制 |
| |
| 引用本文: | 田翔, 何仁. 混合动力客车模式切换多控制器的协调控制[J]. 交通运输工程学报, 2017, 17(6): 150-158. |
| |
| 作者姓名: | 田翔 何仁 |
| |
| 作者单位: | 江苏大学 汽车与交通工程学院, 江苏 镇江 212013 |
| |
| 基金项目: | 江苏省高校自然科学研究重大项目13KJA580001 |
| |
| 摘 要: | 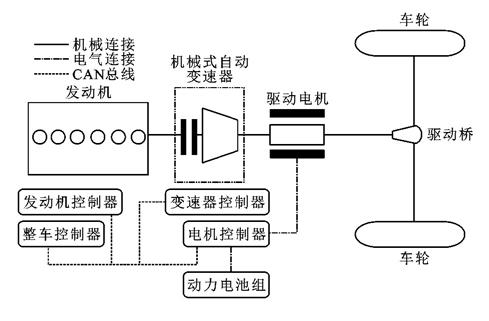
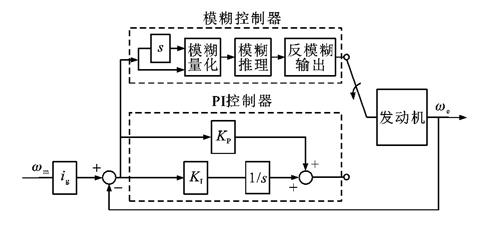
分析了并联混合动力客车由纯电动驱动模式向发动机单独驱动模式切换的过程, 借鉴了切换系统的基本思想, 提出混合动力客车模式切换多控制器的协调控制策略; 按照离合器的状态将驱动模式切换过程划分为3阶段, 根据车辆运行所处的不同阶段, 设计了Fuzzy-PI控制器与滑模控制器对发动机与驱动电机进行动力协调控制; 以冲击度作为评价模式切换品质的量化指标, 在MATLAB/Simulink/Stateflow中建立了并联混合动力系统仿真模型, 搭建了整车试验平台, 分析了协调控制的效果。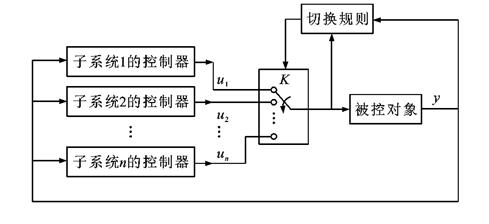
仿真结果表明: 未采用协调控制策略时, 在离合器滑摩阶段, 由于离合器两端转速差较大, 其传递摩擦转矩会产生约189N·m的扰动, 导致车速骤降, 反向的最大冲击度约为41.2m·s-3; 采用协调控制策略后, 在整个模式切换过程中冲击度变化范围为-34m·s-3, 保证了动力传动系统输出的平稳性, 有效地抑制了驱动模式切换过程中对车辆所造成的冲击; 在一完整的驱动模式切换中, 实际车速的偏差小于5%, 冲击度控制在-57m·s-3, 试验结果与仿真结果基本一致, 证明了该策略的可行性与有效性。
|
| 关 键 词: | 汽车工程 并联混合动力客车 模式切换 多控制器 Fuzzy-PI控制 全局滑模控制 |
| 收稿时间: | 2017-06-30 |
| 本文献已被 CNKI 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|