| 基于单参数自调节RM-GO-LSVR的船舶操纵灰箱辨识建模 |
| |
| 引用本文: | 梅斌, 孙立成, 史国友, 马文耀, 王伟. 基于单参数自调节RM-GO-LSVR的船舶操纵灰箱辨识建模[J]. 交通运输工程学报, 2020, 20(2): 88-99. doi: 10.19818/j.cnki.1671-1637.2020.02.008 |
| |
| 作者姓名: | 梅斌 孙立成 史国友 马文耀 王伟 |
| |
| 作者单位: | 1.大连海事大学航海学院,辽宁 大连 116026;;2.大连海事大学辽宁省航海安全保障重点实验室 辽宁 大连 116026;;3.广东海洋大学海运学院, 广东 湛江 524088 |
| |
| 基金项目: | 辽宁省自然科学基金;国家自然科学基金 |
| |
| 摘 要: | 
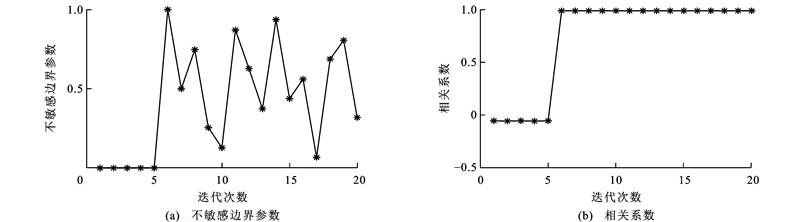
为实现舵角小、试验数据少条件下船舶操纵辨识建模, 提出了一种船舶操纵运动灰箱模型; 搜集水动力系数已知的船舶运动数学模型作为备选参考模型(RM), 计算被辨识船舶与备选RM的相关系数, 并以此筛选合适的RM; 运用相似准则将观测数据映射到RM的输入值域, 建立被辨识船舶与RM的运动关联, 获得了RM的加速度项, 并使用线性支持向量回归(LSVR)机补偿被辨识船舶和RM加速度项间的误差; 分析了机理模型, 设计了合适的LSVR输入项, 使用全局优化(GO)算法自动调节了LSVR的不敏感边界参数; 基于自航模试验数据训练了灰箱模型, 并与约束模试验(CMT)结果和计算流体力学结果比较, 验证了灰箱模型的泛化能力和预报精度。研究结果表明: 在20°船艏向、20°舵角Z形试验预报中, 灰箱模型所得第一超越角精度至少比CMT、虚拟约束模试验(VCMT)和RM方法所得结果高1°, 灰箱模型所得第二超越角精度至少比CMT和VCMT所得结果高0.4°; 在35°舵角旋回试验预报中, 灰箱模型所得进距精度至少比CMT、VCMT、数值循环水槽试验(NCWCT)和RM方法所得结果高1%, 灰箱模型所得战术直径精度比CMT所得结果低4%, 比NCWCT所得结果高10%;RM方法有助于灰箱辨识建模, GO算法能够优化LSVR的不敏感边界参数, 建立的单参数自调节灰箱辩识建模方法能够实现小舵角、少数试验条件下的船舶操纵辨识建模。
|
| 关 键 词: | 船舶工程 船舶操纵 线性支持向量回归 辨识建模 验证试验 |
| 收稿时间: | 2019-09-01 |
| 本文献已被 CNKI 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|