| 网联自动驾驶车辆下匝道换道决策模型 |
| |
| 引用本文: | 郝威, 张兆磊, 吴其育, 易可夫. 网联自动驾驶车辆下匝道换道决策模型[J]. 交通运输工程学报, 2023, 23(5): 242-252. doi: 10.19818/j.cnki.1671-1637.2023.05.017 |
| |
| 作者姓名: | 郝威 张兆磊 吴其育 易可夫 |
| |
| 作者单位: | 长沙理工大学 智能道路与车路协同湖南省重点试验室,湖南 长沙 410114 |
| |
| 基金项目: | 国家重点研发计划2022YFC3803700 国家自然科学基金项目52172339 国家自然科学基金项目52002036 湖南省科技创新计划项目2023RC1059 湖南省科技创新计划项目2023SK2052 湖南省科技创新计划项目2022WZ1011 湖南省自然科学基金项目2021JJ40577 湖南省研究生科研创新项目CX20220852 长沙市科技计划项目kh2202002 长沙市科技计划项目kh2301004 湖南省教育厅科学研究项目20B009 |
| |
| 摘 要: | 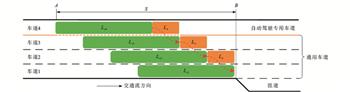
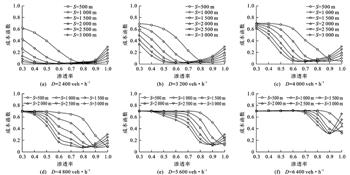
为宏观刻画自动驾驶专用车道上的网联自动驾驶车辆(CAV)下匝道的行为,提出了混合交通流下基于安全风险的CAV下匝道换道决策模型;该模型将换道间隙选择过程抽象为成功换道或不成功换道的伯努利试验,并在此基础上建立了基于交通流理论的车辆换道成功率计算方法;提出了耦合换道安全与效率的下匝道换道决策成本函数,其中安全与效率的权重参数根据不同的驾驶模式确定,从而确定CAV最优的换道意图生成点,为CAV换道提供指令。数值分析结果表明:CAV下匝道成功率由换道准备距离、交通需求和CAV渗透率共同决定,成本函数随着CAV渗透率的变化出现明显的拐点;交通量为2 400 veh·h-1时,CAV的最佳换道意图生成点为距离下匝道入口1 km处;当交通量增加至4 000 veh·h-1时,最佳换道意图生成点为距离下匝道入口2.5 km处;当交通量大于6 400 veh·h-1时,需要提高CAV的侵略性才能高效驶出高速公路;成本函数随着CAV渗透率的增大先下降再升高,若渗透率低于拐点渗透率,则增加换道准备距离可以降低成本函数,若渗透率高于拐点渗透率,则需通过减小换道准备距离降低成本函数。
仿真结果表明:交通需求和渗透率对车辆下匝道的安全性影响显著,渗透率由30%提升至60%,碰撞时间最大降幅为76.23%。
|
| 关 键 词: | 网联自动驾驶车辆 换道决策模型 成本函数 混合交通流 数值仿真 CAV渗透率 |
| 收稿时间: | 2023-05-14 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|