| 网联自动驾驶车辆道路交通安全研究综述 |
| |
| 引用本文: | 郭延永, 刘佩, 袁泉, 刘攀, 徐进, 张晖. 网联自动驾驶车辆道路交通安全研究综述[J]. 交通运输工程学报, 2023, 23(5): 19-38. doi: 10.19818/j.cnki.1671-1637.2023.05.002 |
| |
| 作者姓名: | 郭延永 刘佩 袁泉 刘攀 徐进 张晖 |
| |
| 作者单位: | 1.东南大学 交通学院,江苏 南京 211189;;2.清华大学 车辆与运载学院,北京 100084;;3.重庆交通大学 交通运输学院,重庆 400074;;4.武汉理工大学 智能交通系统研究中心,湖北 武汉 430063 |
| |
| 基金项目: | 国家自然科学基金项目52272343 国家自然科学基金项目51925801 国家自然科学基金项目52232012 |
| |
| 摘 要: | 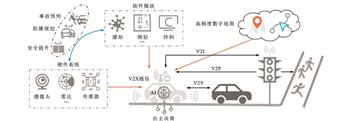
为全面了解网联自动驾驶交通安全领域的研究进展,利用文献计量方法通过Web of Science核心数据库对Connected and Automated (Autonomous) Vehicles、Connected (Autonomous) Vehicles、Traffic Safety (Accident, Crash, Collision, Conflict)等关键词进行检索,共获取2010至2021年2 130篇相关文献,涵盖5 474位作者和7 017个关键词;利用科学知识图谱对网联自动驾驶道路交通安全研究发展历程、研究归属地、研究主题与内容、研究热点等进行分析总结和可视化解析;通过研究主题和热点的分析指出未来研究方向。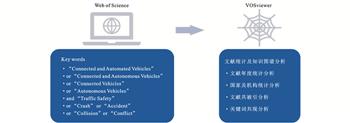
研究结果表明:网联自动驾驶道路交通安全研究经历了起步阶段、缓慢增长阶段和快速发展阶段;美国和中国是当今世界对网联自动驾驶道路交通安全领域贡献最大的2个研究主体;研究主题主要围绕宏微观交通流、交通系统影响(交通出行、交通环境、交通安全)、车辆安全避障与路径规划、交通安全评价等展开,研究热点重点围绕网联自动驾驶交通控制与系统优化、新型混合交通流交通安全分析、微观行为建模与仿真安全评估等;未来研究需重视由单车安全转向交通流事故风险传播研究,突破智能网联车队群体决策与编队控制技术,构建虚拟现实下智能网联数据化仿真环境与深度测试平台,挖掘网联自动驾驶人机共驾情境下驾驶人接管绩效评价体系,从而进行精细化的事故风险致因分析、交通安全建模与评估以及事故风险防控策略与算法研究。

|
| 关 键 词: | 智能交通 道路交通安全 网联自动驾驶车辆 文献计量统计 科学知识图谱 可视化分析 |
| 收稿时间: | 2023-03-21 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载全文 |
|