| 基于改进模糊PID-Smith控制器的高速动车组停车方法 |
| |
| 引用本文: | 李中奇, 许健. 基于改进模糊PID-Smith控制器的高速动车组停车方法[J]. 交通运输工程学报, 2020, 20(4): 145-154. doi: 10.19818/j.cnki.1671-1637.2020.04.011 |
| |
| 作者姓名: | 李中奇 许健 |
| |
| 作者单位: | 1.华东交通大学 江西省先进控制与优化重点实验室,江西 南昌 330013;;2.华东交通大学 电气与自动化工程学院,江西 南昌 330013 |
| |
| 基金项目: | 国家自然科学基金;江西省自然科学基金 |
| |
| 摘 要: | 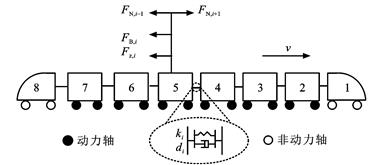
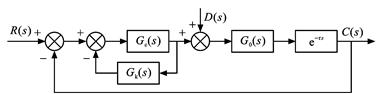
为解决动车组制动过程中电制动与空气制动切换时控制模型参数变化和空气制动延时大的问题,以提高动车组停车的精确性,提出了一种改进模糊PID-Smith控制器;通过分析动车组制动过程中单个车厢的力学模型,考虑列车制动过程的特点,建立了关于运行速度和制动力的二阶纯延时传递函数;将离散化的二阶纯延时传递函数与单个车厢的力学模型结..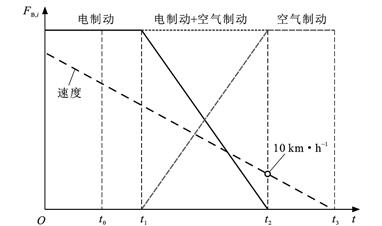
.
|
| 关 键 词: | 动车组 制动 多质点 模糊PID Smith预估控制器 |
| 收稿时间: | 2020-04-12 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|