| 大深度载人潜水器舱室噪声研究 |
| |
| 引用本文: | 刘瑞杰, 王雪仁, 李欣, 等. 基于六自由度机械臂的局域空间噪声检测方法[J]. 中国舰船研究, 2023, 18(5): 244–250. doi: 10.19693/j.issn.1673-3185.02858 |
| |
| 作者姓名: | 刘瑞杰 王雪仁 李欣 管峰 |
| |
| 作者单位: | 海军研究院,北京 100161 |
| |
| 摘 要: | 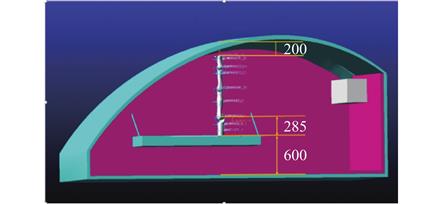
目的 为解决舰艇舱室内部空间复杂狭小导致人工检测噪声困难的问题,提出基于目标导向RRT算法的机械臂局域空间规划方法。 方法 以六自由度机械臂为载体,在机械臂末端安装工装夹具,并以舱室内部的4个固定点为基准点,研究机械臂在局域空间内的遍历轨迹规划。其中,以基准点1为例,对其6个测量面、147个测点的噪点进行测量。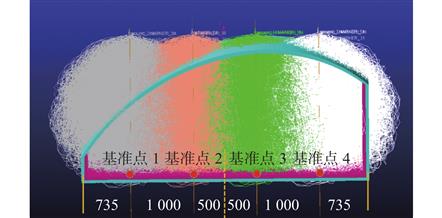
通过噪声信号与空间待测点位姿信息的匹配分析,反馈当前测点的环境噪声,形成声压云图。 结果 结果显示,针对4个基准点所对应的测点,机械臂可以实现对所有测点的轨迹规划与噪声测量,且无碰撞发生。 结论 所提方法能够实现在狭小舱室局域空间内的智能规划以及内部噪声检测,具有实用价值。

|
| 关 键 词: | 噪声检测 六自由度机械臂 舰船居住性 轨迹规划 RRT 算法 |
| 收稿时间: | 2022-04-17 |
| 修稿时间: | 2022-08-02 |
|
| 点击此处可从《中国舰船研究》浏览原始摘要信息 |
|
点击此处可从《中国舰船研究》下载免费的PDF全文 |
|