| 基于模型预测控制的CACC系统通信延时补偿方法 |
| |
| 引用本文: | 田彬, 姚柯, 王孜健, 谷淦, 徐志刚, 赵祥模, 景峻. 基于模型预测控制的CACC系统通信延时补偿方法[J]. 交通运输工程学报, 2022, 22(4): 361-381. doi: 10.19818/j.cnki.1671-1637.2022.04.028 |
| |
| 作者姓名: | 田彬 姚柯 王孜健 谷淦 徐志刚 赵祥模 景峻 |
| |
| 作者单位: | 1.长安大学 信息工程学院,陕西 西安 710064;;2.山东高速集团有限公司 山东省智慧交通重点实验室,山东 济南 250102;;3.山东高速信息集团有限公司,山东 济南 250100 |
| |
| 基金项目: | 国家重点研发计划2019YFB1600100国家重点研发计划2021YFB2501203国家自然科学基金项目61973045中国博士后科学基金项目2020M673323中国博士后科学基金项目2021T140586高等学校学科创新引智计划B14043陕西省重点研发计划S2018-YF-ZDGY-0300 |
| |
| 摘 要: | 
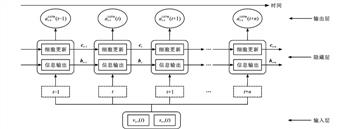
为确保通信延时条件下协同式自适应巡航控制(CACC)系统的弦稳定性,利用模型预测控制(MPC)和长短期记忆(LSTM)预测方法,研究CACC系统中车辆协同控制下的通信延时补偿方法;基于车辆队列四元素架构理论,构建了包括车辆动力学模型、间距策略、网络拓扑和MPC纵向控制器的系统模型,并综合考虑2范数和无穷范数弦稳定性条件,提出了CACC车辆队列混合范数弦稳定性量化指标,最终形成协同式车辆队列建模与评价体系;设计了一种利用前车加速度轨迹(PVAT)作为开环优化参考轨迹的MPC方法,即MPC-PVAT,通过综合考虑队列的跟驰、安全、通行效率和燃油消耗等性能指标,使目标函数趋于最小代价,从而得到当前时刻的最优控制量,并利用庞特里亚金最大值原理对所设计的优化问题进行快速求解;在MPC-PVAT基础上,提出一种基于长短期记忆(LSTM)网络的通信延时补偿方法,即MPC-LSTM,将跟驰车辆的传感器信息输入LSTM网络来预测其前车的运动状态,从而缓解短暂通信延时对车辆队列稳定性的影响。仿真测试结果表明:MPC-LSTM可容忍的通信延时上界大于1.5 s,比MPC-PVAT提升了0.8 s,比线性控制器提升了1.1 s;在基于实车数据测试中,当通信延时增加到1.2 s时,MPC-LSTM的弦稳定性指标相比MPC-PVAT提升了20.33%,与线性控制器相比稳定性提升了39.35%。
可见,在通信延时较大的情况下,MPC-LSTM对通信延时具有很好的容忍性,从而有效地保证了CACC车辆队列的弦稳定性。
|
| 关 键 词: | 交通控制 自动驾驶 协同式自适应巡航系统 模型预测控制 通信延时 弦稳定性 深度学习 |
| 收稿时间: | 2022-03-24 |
|
| 点击此处可从《交通运输工程学报》浏览原始摘要信息 |
|
点击此处可从《交通运输工程学报》下载免费的PDF全文 |
|